Research Experience
This section showcases some of the latest work I have created with links to the projects and a brief description.
Here are some of my graduate school research experiences at MIT
Fairness in Multi-Agent Reinforcement Learning
Graduate research at MIT: Working on developing fair and efficient resource distribution in multi-agent reinforcement learning.
Multi-agent system MARL
Learn more hereBelow are some projects done as an undergraduate intern at CMU, IISc, McGill and TU Dresden!
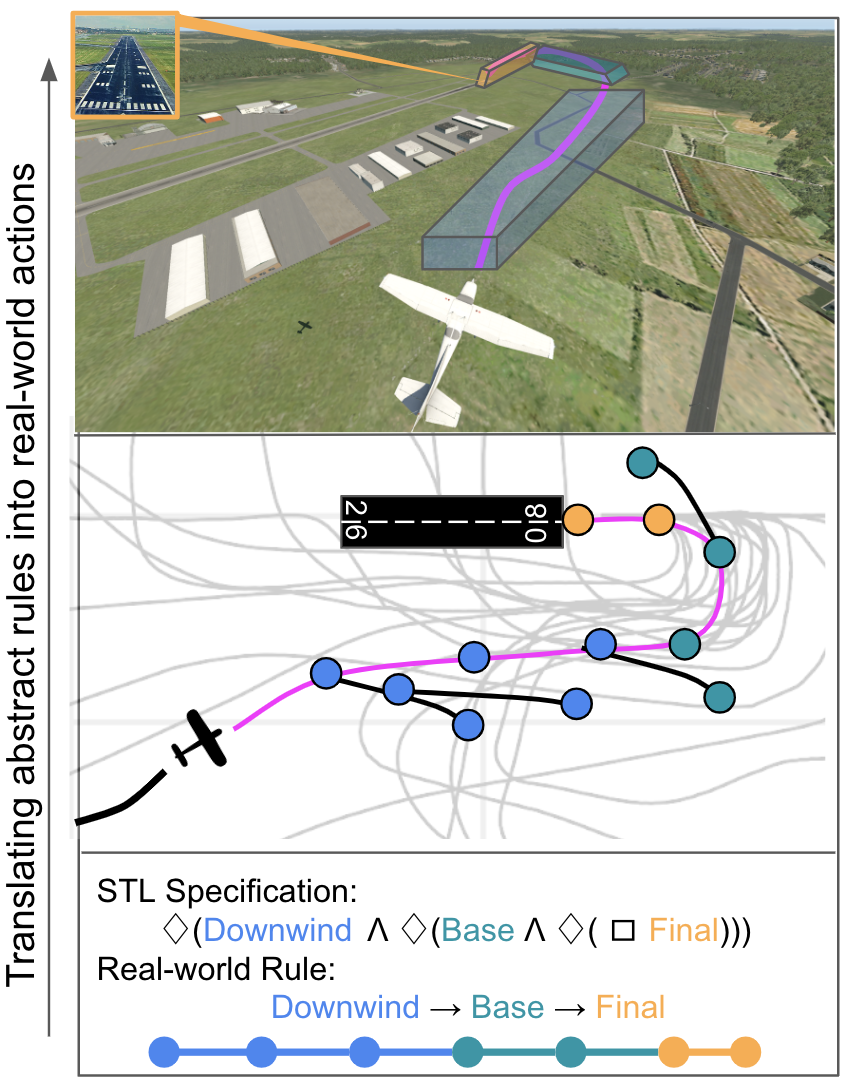
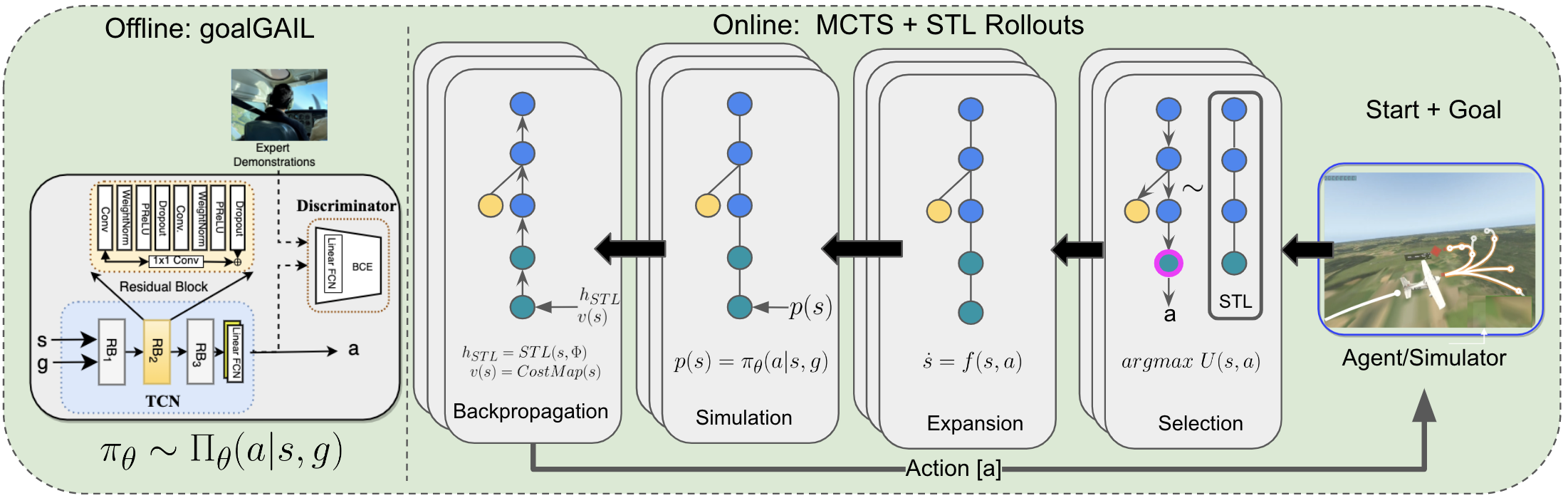
Socially Aware Imitation Learning in Multi-Aircraft Shared Airspace
Developing safe and socially aware motion planning method using imitation learning
for general aviation (GA) aircraft in multi-aircraft shared airspace. Incorporating safety through formal logic methods.
Robotics Institute Summer Scholar RISS Program, AirLab, Carnegie Mellon University
Work presented at 2023 IEEE International Conference on Robotics and Automation (ICRA)
Social Navigation STL Multi Agent System
Paper Video
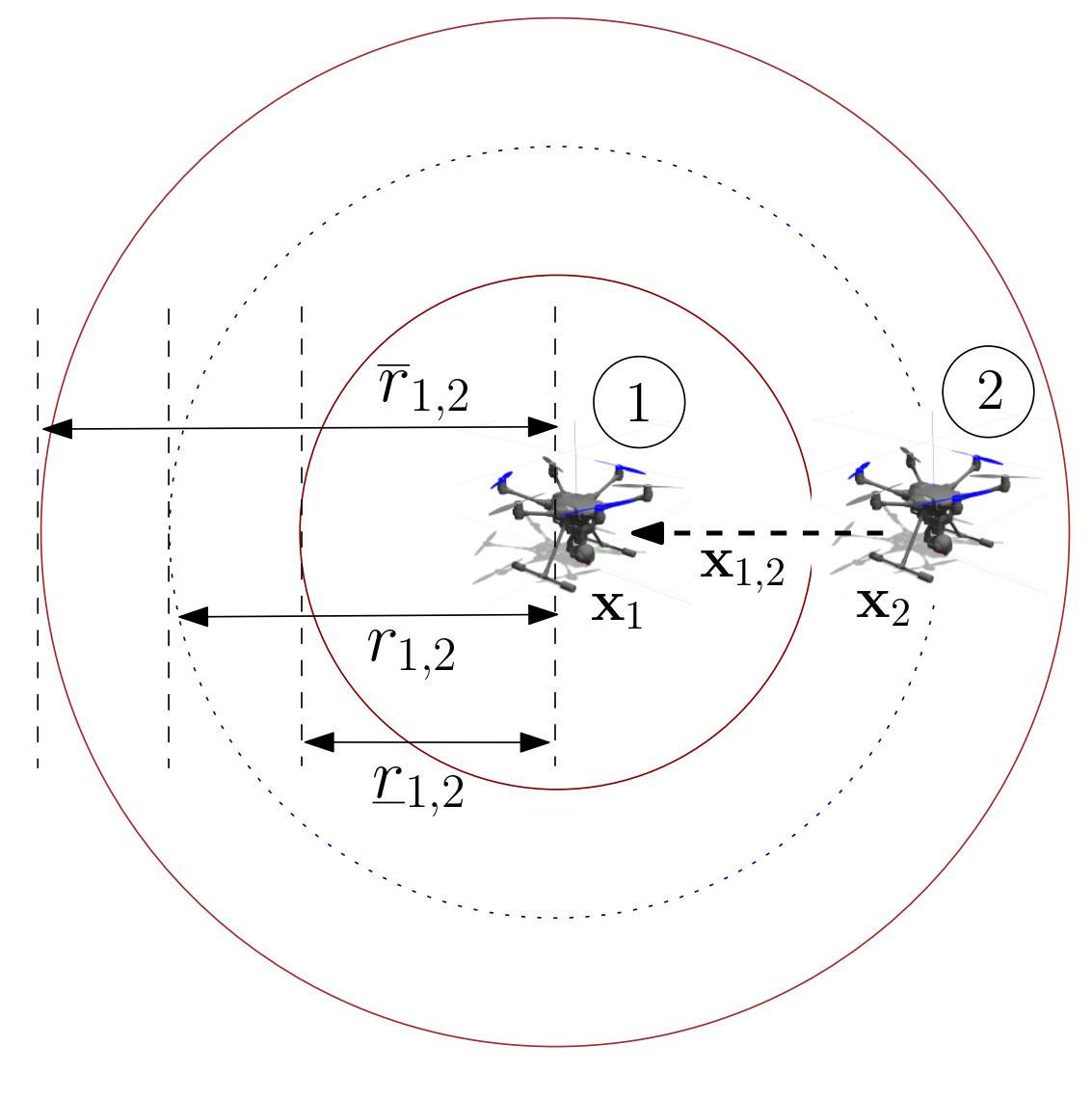
Multi UAV Trajectory Tracking and Obstacle Avoidance
Developed and simulated a pair of UAVs to track a moving target. Implemented Barrier Lyapunov Functions to maintain the desired formation. Internship at the GCDS Lab, IISc.
Published in the Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering. 2022
ROS Gazebo Obstacle Avoidance Barrier Functions
Paper Video
Deep Learning based Manipulator Arm Inverse Dynamics
Data driven approach to learn inverse dynamics of a robotic manipulator arm. Developed a setup on ROS to learn model dynamics when model information is not provided.
Worked remotely at McGill University as a part of MITACS Globalink Research Internship.
Deep Learning Manipulation Inverse Dynamics

FLYing maniPULATOR: Fully Actuated Aerial Manipulator Project
Analysed the omnidirectional controllability, studied nonlinear control theory, and dynamics of existing system for fault-tolerant control.
Transitioned project software stack ROS1 to ROS2 and optimized the code.
Worked remotely with TU Dresden as a part of DAAD WISE Scholarship 2020.
Nonlinear Controllability ROS2
Here are some early robotics projects
Agri-Drone Pest Detection and Path Planning
Coverage path planning for agricultural field. Optimal trajectory, safe and robust control using Control Barrier Functions. Bachelor's Thesis Project
Deep Learning Agri Drone Path Planning
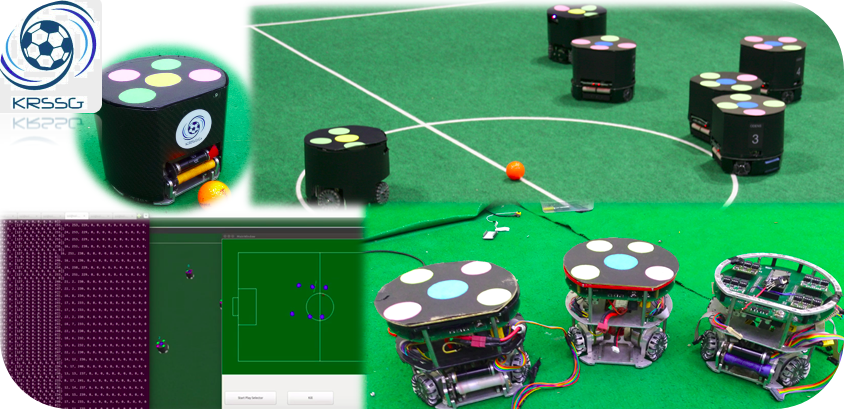
RoboSoccer Small Sized League
Among top 25 teams in the world that qualified for SSL RoboCup 2019, a robot soccer competition. Worked on motor control and embedded systems. Results to be published soon.
RoboCup KRSSG Embedded
Team's GitHub
Crusade Robotix
IIT Kharagpur's tech fest Kshitij 2019 Image processing Robot based on Raspberry Pi.
Tech Fest Image Processing RPi
GitHub
Fuzzy Logic Control for PID
Developed and tested an optimized Fuzzy control code for motor velocities. Applied on the RoboSoccer 2020 robots. Showed robustness even when disturbances were applied.
Fuzzy Velocity Control
GitHubHere are some of my undergraduate aerospace and controls projects!
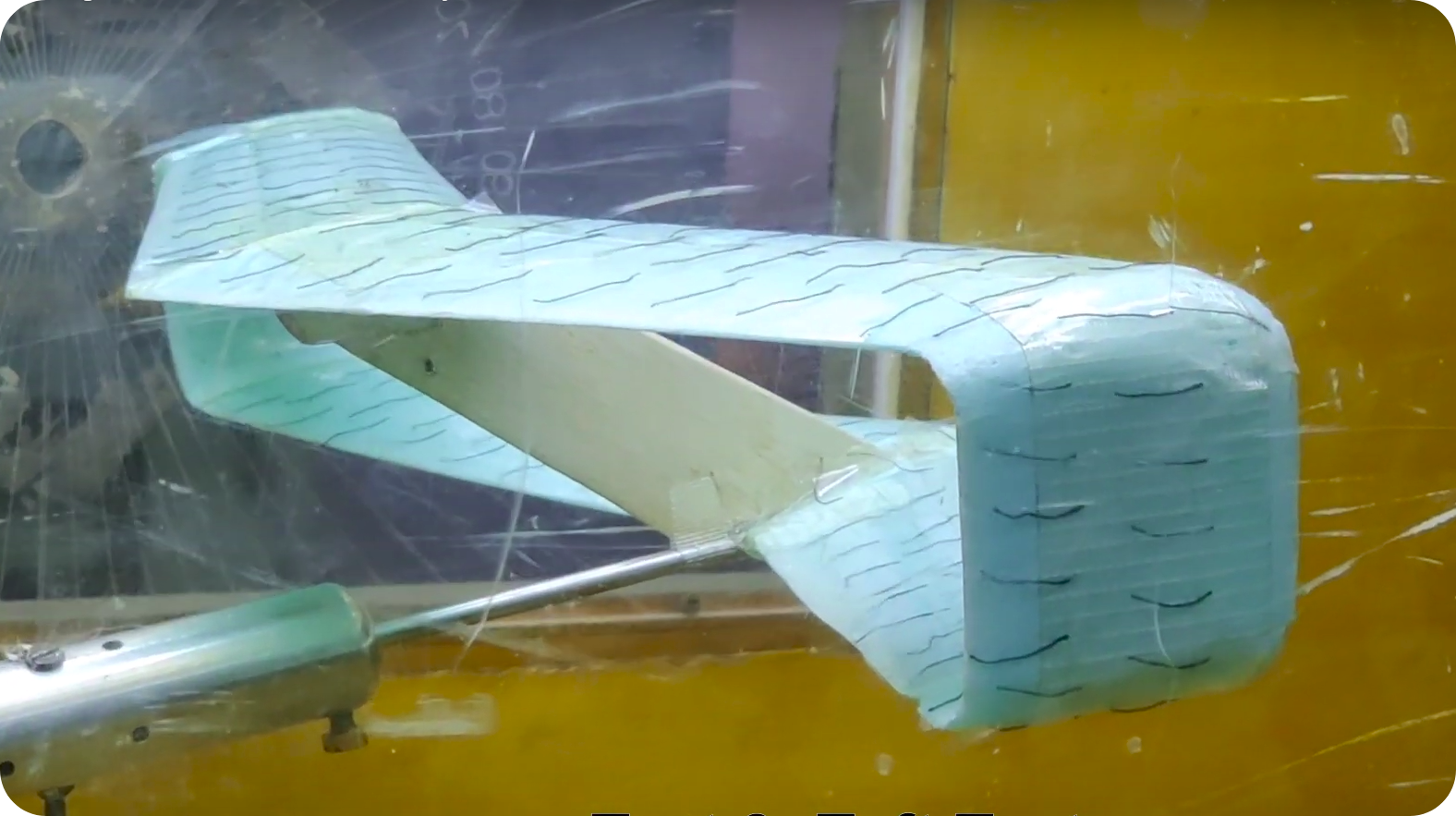
Box Wing MAV
Built, tested and studied properties for an improvised box wing MAV. Presented at the National Conference of Wind Tunnel Testing, Kanpur, India (2020)
MAV Box Wing Aerodynamics
PreprintVideo Project Page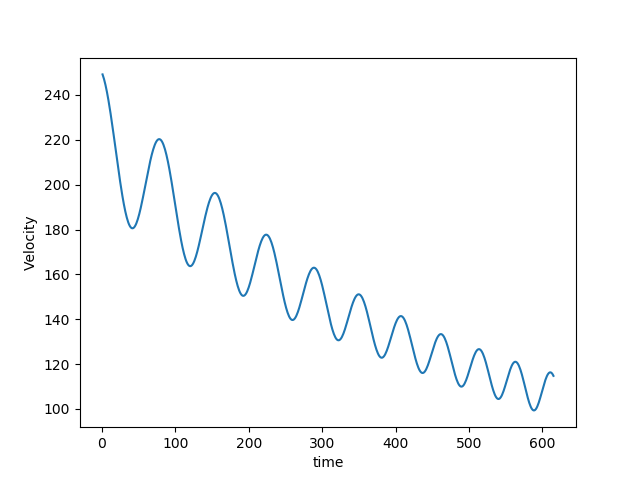
Range optimization of a guided projectile
Using a Homotopy method, determine the maximum range for a guided projectile based on optimal controls.
Trajectory control Homotopy Optimize
GitHub
National Aerospace Conceptual Design Competition 2, 3, 4
Won 3rd Place NACDeC-2: Designed a solar powered and fuel cell combination twin propeller high aspect ratio wing aircraft. Competition by the Aeronautical Society of India (AeSI). Led the Department Team for NACDeC-4.
Aircraft Design Conceptual Design
Some additional projects are listed below

Panoramic Image Generation
Automated tool that performed multiple image stitching followed by blending. Semester Project, Image Processing, Autumn 2018.
Image Processing
GitHub
MathWorks Minidrone Competition 2021
Led the IITKGP Aerospace Team for MathWorks Napoli Minidrone Competition 2021, to develop algorithm for a line follwing drone on Simulink. Event cancelled after submission round.
Coming soon! Robotics and AI
AUVSI Student Unmanned Aerial Systems (SUAS)
UAV club team to participate in the Association for Unmanned Vehicle Systems International (AUVSI) Student Unmanned Aerial Systems (SUAS) Competition 2021. Event delayed due to COVID-19
UAV Team Head